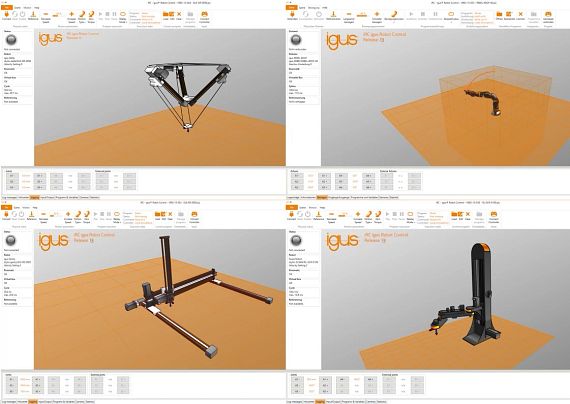
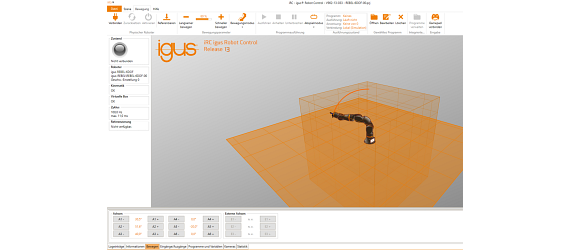
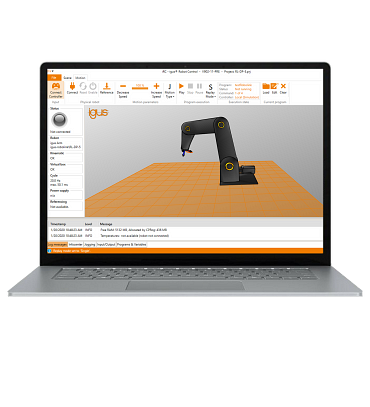
ロボットのプログラミング、シミュレーション、制御を無料で、ライセンスフリーで行うことができます。
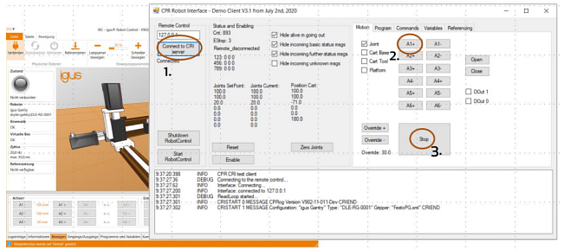
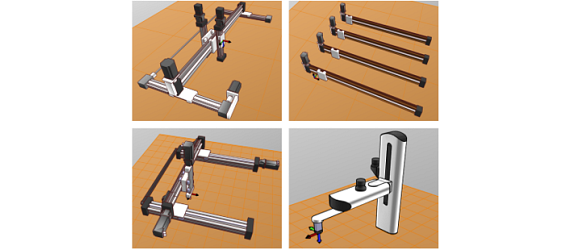
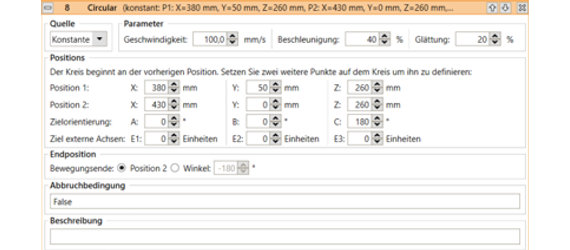
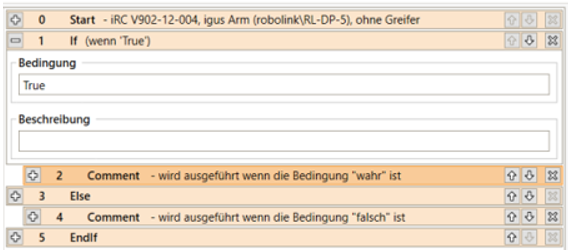
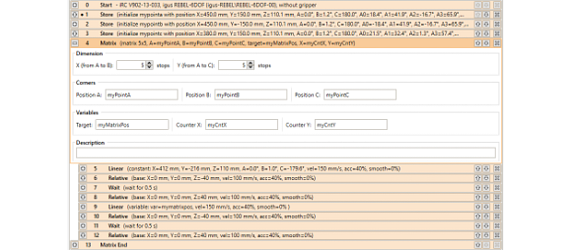
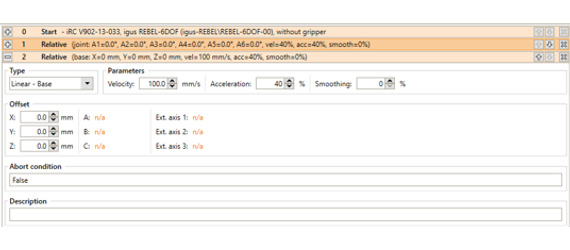
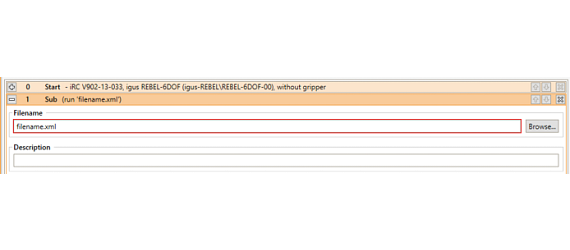
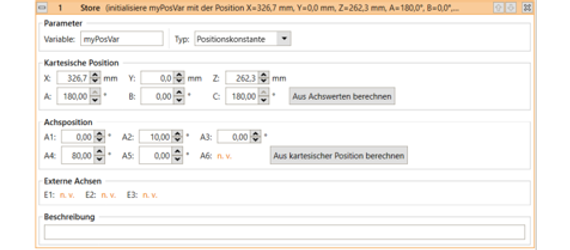
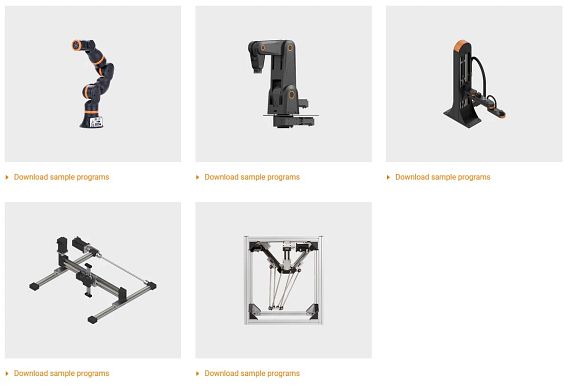
イグス ロボットコントロールは、シンプルで直感的なロボットプログラミングと制御を可能にし、自動化への参入を容易にします。モジュール設計により、デルタロボット、リニアロボット、多軸ジョイントロボットなど、異なるロボットの運動特性を制御することができます。ソフトウェアを使用して、3Dインターフェース上でロボットの各動きをシミュレーションすることができます - このステップでは、ロボットを接続する必要はありません。